The
Ultimate Wave Predictor
The Ultimate Wave Predictor starts with the least squares estimator. The basic formulation is the following form
![]()
where
the data points, vectors and matrix are defined as:
![]()
![]()
The expression ![]() is the pseudo inverse matrix of
is the pseudo inverse matrix of ![]() and can be represented by
and can be represented by ![]() in the basic formulation where,
in the basic formulation where,
![]()
and the basic formulation can be
rewritten to the alternate form of
![]()
Observational side note, the expression ![]() is very similar to another expression,
is very similar to another expression, ![]() .
The
.
The ![]() values in the Data Points are typically set on
a regular integer interval. The example below shows an interval of 1,
values in the Data Points are typically set on
a regular integer interval. The example below shows an interval of 1,
![]()
The ![]() values are the sample data for each
corresponding
values are the sample data for each
corresponding ![]() interval. As an example, we can find the
linear regression of 10 data points using the formulation
interval. As an example, we can find the
linear regression of 10 data points using the formulation![]() . Below is an n-x-y
sample table of some data points.
. Below is an n-x-y
sample table of some data points.
|
n |
x |
y |
|
0 |
1 |
0.87 |
|
1 |
2 |
10.48 |
|
2 |
3 |
24.94 |
|
3 |
4 |
39.91 |
|
4 |
5 |
45.04 |
|
5 |
6 |
56.81 |
|
6 |
7 |
56.40 |
|
7 |
8 |
74.83 |
|
8 |
9 |
75.44 |
|
9 |
10 |
88.61 |
The position matrix is,
The pseudo inverse matrix becomes,
and reduces to,

The data vector is,
The polynomial vector works out to,
![]()
The linear regression formulation then is
the following,
![]()
![]()
The formulation can now be approximated
to a decimal value of,
![]()
The approximate linear regression line is
the following equation,
![]()
The plot of the data points and the
linear regression is shown next.
The Ultimate Wave Predictor is derived
from the least squares estimator. However, in the current process of
formulation there is a problem. The process leads to an equation that is
dependent on the ![]() variable. There is a way to eliminate the
variable. There is a way to eliminate the ![]() variable in an alternate process and have the
prediction value only based on
variable in an alternate process and have the
prediction value only based on ![]() values.
values.
The alternate process can work for any ![]() Position Matrix format of
Position Matrix format of ![]() ,
however, we will use a special case for our Ultimate Wave Predictor. The
special case is when the Position Matrix is a square matrix. The square matrix
allows the pseudo inverse matrix to reduce to a simpler form. When
,
however, we will use a special case for our Ultimate Wave Predictor. The
special case is when the Position Matrix is a square matrix. The square matrix
allows the pseudo inverse matrix to reduce to a simpler form. When ![]() ,
the
,
the ![]() matrix simplifies to
matrix simplifies to ![]() and the
and the ![]() formulation becomes
formulation becomes ![]() .
.
To eliminate the ![]() variable, we need to transform the
variable, we need to transform the ![]() components in the data points, position
matrix, and the
components in the data points, position
matrix, and the ![]() value in the polynomial vector. The
value in the polynomial vector. The ![]() values in the data points are transformed from
a fixed set value to an anywhere positional base point,
values in the data points are transformed from
a fixed set value to an anywhere positional base point, ![]() ,
and a scalable interval differential,
,
and a scalable interval differential, ![]() .
Each data point increments out from the base point on an integer based value of
.
Each data point increments out from the base point on an integer based value of ![]() .
The basic expression representing this set is
.
The basic expression representing this set is ![]() and is substituted in the data point set as
follows,
and is substituted in the data point set as
follows,
![]()
This has the effect of changing the
position matrix to,

When ![]() ,
the position matrix rewrites to,
,
the position matrix rewrites to,

The ![]() value in the polynomial vector is transformed
to the next interval in the
value in the polynomial vector is transformed
to the next interval in the ![]() series of values,
series of values, ![]() ,
and when
,
and when ![]() the polynomial vector changes to,
the polynomial vector changes to,
![]()
The ![]() values are unchanged and when we go through
the formulation, the
values are unchanged and when we go through
the formulation, the ![]() and
and
![]() values will drop out; the
values will drop out; the ![]() value will drop, but will return in a tracking
scheme that leads to a set of equations used in the final equation. The
formulation then becomes,
value will drop, but will return in a tracking
scheme that leads to a set of equations used in the final equation. The
formulation then becomes,
![]()
From here we will work an expansion set
of equations to see where the projections lead and will be further refined into
a final equation. Starting with the zeroth degree, ![]() ,
we can derive the first equation.
,
we can derive the first equation.
Polynomial Vector,
![]()
![]()
![]()
![]()
Position Matrix,
![]()
![]()
![]()
Pseudo Inverse Matrix,
![]()
![]()
Data Vector,
![]()
Zeroth Degree Formulation,
![]()
![]()
This is the beginning equation in the
set,
![]()
Next we will work the first degree where ![]()
Polynomial Vector,
![]()
![]()
![]()
Position Matrix,
![]()
![]()
Pseudo Inverse Matrix,
![]()
Data Vector,
![]()
First Degree Formulation,
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
And a one more for a third step, a second
degree equation when ![]() .
.
Polynomial Vector,
![]()
![]()
![]()
Position Matrix,

Pseudo Inverse Matrix,

Data Vector,
![]()
Second Degree Formulation,
![]()

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
In each of the formulations the ![]() and
and
![]() values drop out and leaves only
values drop out and leaves only ![]() values. The
values. The ![]() drops out making it like a vector that can be
positioned anywhere and
drops out making it like a vector that can be
positioned anywhere and ![]() drops out making it automatically scalable to
any size interval; nanometers, seconds, etc. The continuation of the expansion
is given in the table below out to the tenth degree. Each of the equations are
the projection to just the next interval beyond the
drops out making it automatically scalable to
any size interval; nanometers, seconds, etc. The continuation of the expansion
is given in the table below out to the tenth degree. Each of the equations are
the projection to just the next interval beyond the ![]() data point to
data point to ![]() for their associated polynomial regression.
for their associated polynomial regression.
|
n |
Projection
Equation |
|
0 |
|
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
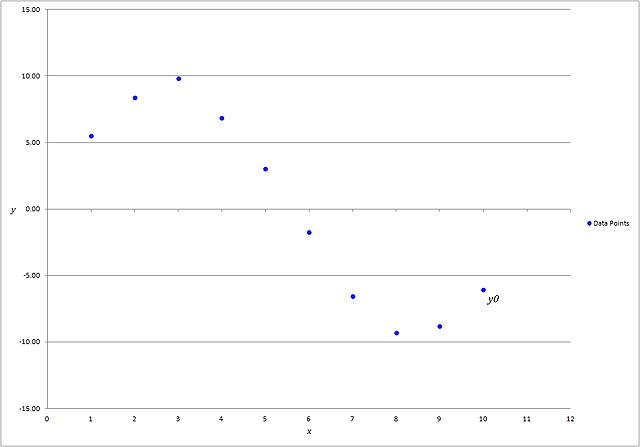
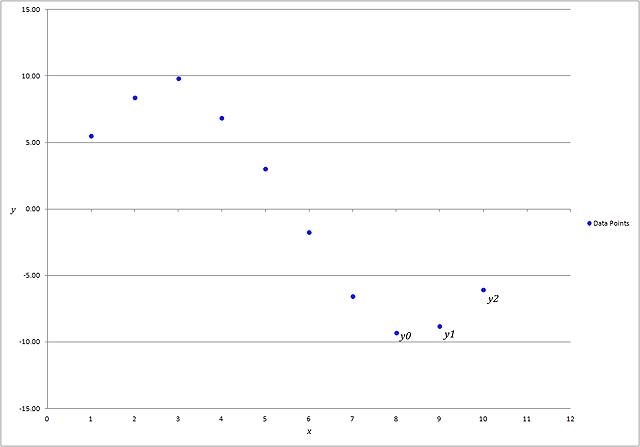
The projection equations work best for
data that oscillates about the ![]() axis like a sine or cosine function. The
projection equations start at the last data point and the
axis like a sine or cosine function. The
projection equations start at the last data point and the ![]() data point moves backward from the last data
point
data point moves backward from the last data
point ![]() for each successive equation. The following
table is an example of a sample set that oscillates about the
for each successive equation. The following
table is an example of a sample set that oscillates about the ![]() axis and is plotted in the graph to the
right.
axis and is plotted in the graph to the
right.
|
|
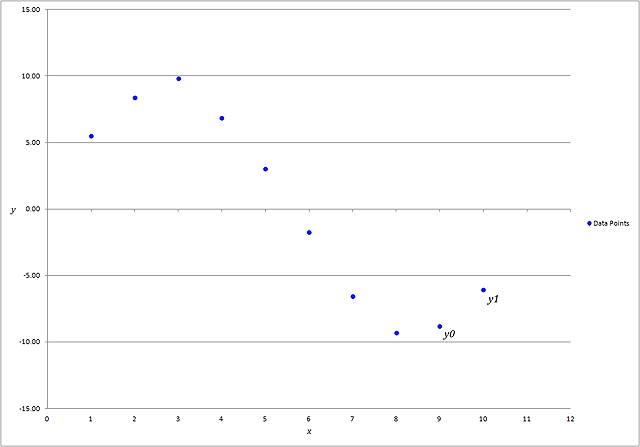
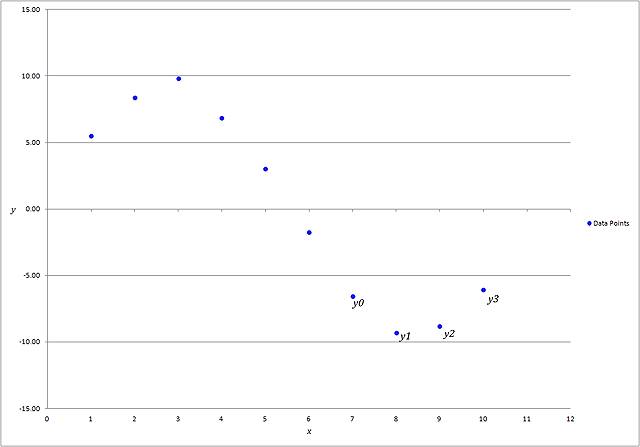
Below is shown how at each successive
projection equation the data points change in relation the last point.
|
0th Degree Projection, |
1st Degree Projection, |
|
|
|
|
2nd Degree Projection, |
3rd Degree Projection, |
|
|
|
Below is a graph of 7 regression lines
that project for the next possible data point at the 11th interval;
in addition, each regression equation is shown right of the legend.
The possible projections can be found
using the regression equations or as we have shown earlier, using the
Projection Equations. The projection equations give the same value as the
regression equations for the same relative degree of the regression polynomial.
There are two problems to consider at this point: first, the backward movement
of the ![]() values in the projection equations needed to
calculate the possible projections and second, the many possible projections as
an outcome.
values in the projection equations needed to
calculate the possible projections and second, the many possible projections as
an outcome.
First we need to make the ![]() values relative to the last data point. We do
this by transforming the sequence of
values relative to the last data point. We do
this by transforming the sequence of ![]() to a sequence of
to a sequence of ![]() to match the last data point position. Below
is the table of projection equations.
to match the last data point position. Below
is the table of projection equations.
|
n |
Projection
Equation |
|
0 |
|
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
The ![]() starts at
starts at ![]() and moves backward at each increasing degree
of the projection equation; shown in the
and moves backward at each increasing degree
of the projection equation; shown in the ![]() column above. When
column above. When ![]() ,
next when
,
next when ![]() ,
next when
,
next when ![]() ,
etc. Likewise, when
,
etc. Likewise, when ![]() ,
next when
,
next when ![]() ,
next when
,
next when ![]() ,
etc. We repeat the substitution for each
,
etc. We repeat the substitution for each ![]() value in the table above and the projection
equations transform to the following table below.
value in the table above and the projection
equations transform to the following table below.
|
n |
Relative
Projection Equation |
|
0 |
|
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
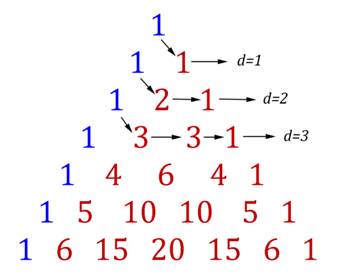
Now, we can reorder the right side of the
equations, remove the ![]() column and add a column
column and add a column ![]() to indicate the depth of how far back in the
data point set the equation is going. The
to indicate the depth of how far back in the
data point set the equation is going. The ![]() value also closely relates to the familiar
pattern, Pascal’s triangle, and the Binomial Formula; where
value also closely relates to the familiar
pattern, Pascal’s triangle, and the Binomial Formula; where ![]() .
This is the 1st level of the projection equations.
.
This is the 1st level of the projection equations.
|
d |
1st
Level Relative Projection Equation |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
|
11 |
|
Next we can find a progressive set of
averages that use the many possible projections in each set by summing each
equation set starting with ![]() ,
then
,
then ![]() ,
and
,
and ![]() ,
and so on. This will give the 2nd level of the projection equations.
The following table shows the progression.
,
and so on. This will give the 2nd level of the projection equations.
The following table shows the progression.
|
d |
Summation
of Each Progressive 1st Level Relative Projection Equation |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
|
11 |
|



This table can be reformed by grouping
the like terms as follows and the coefficient summations.
|
d |
Summation
of Each Progressive 1st Level Relative Projection Equation |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
|
11 |
|

Each summation can be reduced to the following.
|
d |
2nd
Level Relative Projection Equation |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
|
11 |
|
The average is obtained by dividing each
side of the equation by the ![]() coefficient. To find the 3rd level,
it’s best to leave the table as is, because each successive progression in
levels is just the coefficient summations.
coefficient. To find the 3rd level,
it’s best to leave the table as is, because each successive progression in
levels is just the coefficient summations.
|
d |
3rd
Level Relative Projection Equation |
|
1 |
|
|
2 |
|
|
3 |
|
|
4 |
|
|
5 |
|
|
6 |
|
|
7 |
|
|
8 |
|
|
9 |
|
|
10 |
|
|
11 |
|
Again, to find the average, divide both
sides of the equation by the ![]() coefficient.
coefficient.
Each level, ![]() ,
can be associated with a different portion of the Pascal Triangle. Below are
each of the 3 levels for just the first 6 depths and the associated Pascal
Triangle.
,
can be associated with a different portion of the Pascal Triangle. Below are
each of the 3 levels for just the first 6 depths and the associated Pascal
Triangle.
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
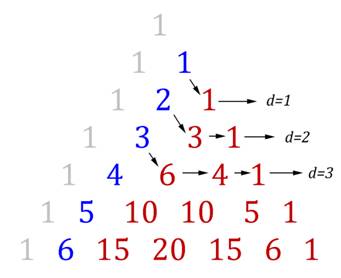
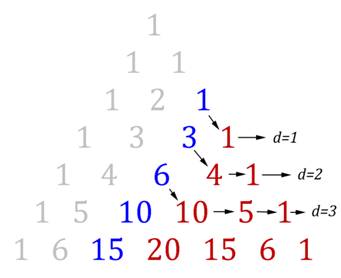
Each coefficient on the right side of the
equations oscillates between + and – starting with + at ![]() .
From this we can now create a single formula to express the projection for
.
From this we can now create a single formula to express the projection for ![]() based on a depth and level for the data point
observations of the
based on a depth and level for the data point
observations of the ![]() values only.
values only.
If ![]() is the regular interval sample data,
is the regular interval sample data, ![]() is the depth backward in the sample data
starting at
is the depth backward in the sample data
starting at ![]() ,
given that
,
given that ![]() and
and ![]() is the level of averaged projection points;
with the expression
is the level of averaged projection points;
with the expression ![]() as the Binomial Formula, then the Unified
Equation is the following.
as the Binomial Formula, then the Unified
Equation is the following.

Solve for ![]() to get the Ultimate Wave Predictor, divide
both sides by
to get the Ultimate Wave Predictor, divide
both sides by ![]() .
.
|
|
